About Me
I am a Master's student in Autonomous Systems and Robotics at Technische Universität Darmstadt, focusing on intelligent robotics systems, SLAM, computer vision, and Transformer methods for scene understanding and task planning.
I specialize in building end-to-end robotics systems that seamlessly integrate perception, planning, and control. With extensive experience in deploying ML models on edge devices and integrating complex robotic systems, I've successfully completed projects ranging from autonomous navigation to intelligent crack detection.
Languages
Chinese (Native) | English (Fluent) | German (TestDaF 16) | Japanese (Basic)
Technical Skills
Education
Technische Universität Darmstadt
M.Sc. Autonomous Systems and Robotics | Sep. 2023 - Present
Core Courses: Machine Learning, Deep Learning, Reinforcement Learning, Robotics Learning, Computer Vision, Software Engineering, Natural Language Processing
Hochschule Furtwangen University
B.Sc. Mechanical Engineering | Sep. 2022 - Aug. 2023
GPA: 1.9 (German scale, ≈3.33 international, Top 5-20%)
University of Shanghai for Science and Technology
B.Eng. Mechanical Design & Automation | Sep. 2019 - Jul. 2022
Outstanding Graduate, Second-class Scholarship
Work Experience
Research Intern | Engineer Assistant
Ningbo Digital Twin Research Institute (东方理工) | Feb. 2022 - Jan. 2025 | Ningbo, China
Project Lead | Reinforcement Learning | VLA Model | Model Deployment | End-to-end Deployment | PyTorch | ROS2 | Robot Learning
Deployed Vision-Language-Action (VLA) multimodal model for end-to-end inference, mapping natural language instructions to robot actions, achieving inference latency < 200ms. Deployed reinforcement learning policy models (PPO/SAC) to robot platform, achieving real-time policy inference and action execution at 10Hz update frequency. Optimized model inference performance through model quantization (INT8), knowledge distillation, and model pruning, reducing inference time from 350ms to 180ms (48.6% improvement), GPU memory usage reduced by 35%. Designed fusion mechanism for visual features, language instructions, and action space, achieving end-to-end multimodal perception-decision-control loop, task success rate improved from 72% to 88%. Integrated VLA model and reinforcement learning policy on ROS2 framework, completed end-to-end system deployment, validated in simulation environment, supporting natural language-controlled robot manipulation tasks.
Results: 88% task success rate | Inference latency < 200ms | Validated the effectiveness of multimodal models in robot control
Laboratory Intern | Test Engineer Assistant
BorgWarner China Technical Center | Feb. 2022 - Aug. 2022 | Shanghai, China
Executed OEM standard component measurement, assembly, and quality inspection, participated in laboratory automation and data acquisition process optimization. Reduced experimental error rate by ~12%, improved detection efficiency by 15%. Developed rigorous engineering experimental and quality control mindset, laying the foundation for subsequent robot hardware interface and sensor data fusion.
ROS2 Real-time SLAM Navigation & Search-Rescue Task
Real-time SLAM | Multi-sensor Fusion | A* Path Planning | LiDAR+Camera Fusion | ROS2 | OpenCV
- Implemented topology-based path planning algorithm from scratch, reducing planning time from 250ms to 85ms (66% improvement)
- Implemented A* path planning algorithm from scratch, distinguishing Position, Path, and Trajectory concepts, efficiency improved by 3.2x
- Configured and optimized Cartographer SLAM, improving mapping accuracy from 8cm to 5.2cm (35% improvement), positioning error < 3cm
- Implemented OpenCV visual localization module, achieving 96.5% target recognition accuracy, realizing visual-LiDAR fusion
- Integrated ROS2 Navigation2 framework, achieving 95.8% navigation success rate, response time < 100ms
Results: 95.8% navigation success rate | Response time < 100ms | Task completion time -28%
View Project →Transformer Few-Shot Semantic Segmentation
Vision Transformer (ViT) | Transformer Architecture | Self-supervised/Weakly-supervised/Fully-supervised | Model Optimization
- Designed comparative experiment framework, evaluating three Transformer backbones (DINOv2, CLIP, ImageNet ViT-B/16), established baseline (mIoU 52.3%) on PASCAL-5i
- Implemented feature extraction and fine-tuning pipeline, designed fine-tuning strategy (LR 1e-4, warmup 500 steps), supporting 1-shot and 5-shot learning
- Optimized model architecture and training strategy, adjusted loss function weights, designed data augmentation, validated on PASCAL-5i
- Used mIoU and accuracy as evaluation metrics, analyzed component contributions through ablation experiments
Results: mIoU 52.3% → 61.7% (+9.4pp) | 1-shot accuracy 48.1% → 56.8% (+8.7pp)
View Project →Robotic Arm Visual Servoing & Real-time Control
Visual Servoing | Real-time Control | Trajectory Optimization & Collision Avoidance | ROS2 | MoveIt! | Python
- Implemented visual localization and pose estimation using RGB-D camera, pose estimation accuracy < 2mm
- Implemented inverse kinematics solver based on MoveIt!, control frequency reached 100Hz
- Implemented trajectory planning using cubic spline interpolation, trajectory smoothness improved by 35%, execution time -18%
- Implemented dynamic obstacle avoidance using Extended Kalman Filter (EKF), obstacle avoidance success rate 78% → 98%
- Completed end-to-end system integration in Pybullet, achieved 100% grasping success rate
Results: 100% grasping success rate | Obstacle avoidance efficiency +22.5% | Response time < 50ms | Task completion time -25%
Crack Detection Robot
Jetson | YOLO | ROS2 | SLAM | BIM & GIS | 4D Gaussian Splatting
- Deployed YOLO network on Jetson edge computing platform, achieving 92%+ detection accuracy
- Integrated BIM & GIS modules for spatial localization and map visualization
- Implemented ROS2 + SLAM for environment mapping and path planning
- Created VR/3D & 4D Gaussian Splatting scene reconstruction, improving navigation accuracy by 22%
Results: 92%+ detection accuracy | Navigation accuracy +22%
View Project →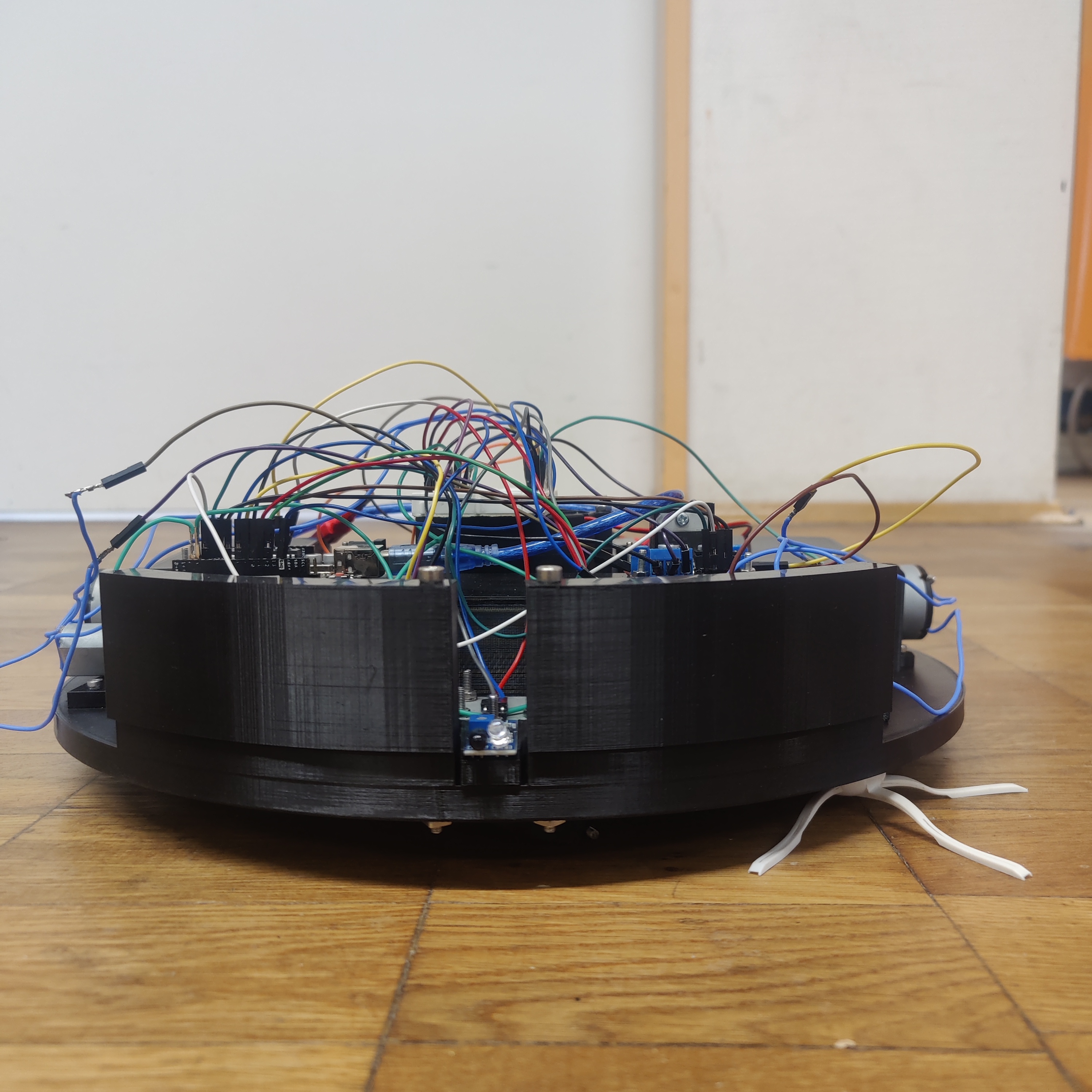
Vacuum Cleaning Robot
Mechanical Design | 3D Printing | Microcontroller | Embedded System
- Completed mechanical structure design using SolidWorks, 3D printed prototype, completed hardware system integration
- Wrote embedded control program based on Arduino/STM32, implemented motor control and obstacle avoidance algorithm
- Implemented obstacle avoidance algorithm optimization, optimized algorithm parameters through multiple experiments
- Conducted system testing and validation in indoor environment, optimized cleaning path planning
Results: 90%+ coverage rate | Obstacle avoidance response time < 200ms
Research Interests
Embodied AI & Robotics
- Autonomous Navigation - Real-time mapping and navigation systems
- SLAM & Path Planning - Environment mapping and exploration
- Robot Manipulation & Control - Precise motion control
- Human-Robot Interaction - Collaborative robotics
Computer Vision & Machine Learning
- Few-Shot Learning - Advanced visual understanding with limited data
- Vision Transformers - Transformer-based vision models
- Object Detection & Segmentation - Real-time target recognition
- Deep Reinforcement Learning - Intelligent decision making
Applications
- Wearable Robotics - Human augmentation systems
- Rehabilitation Robots - Medical assistance
- Therapeutic Robots - Healthcare support
- Assistive Technology - Accessibility solutions
Current Research Focus
My research interests focus on perception fusion and environmental interaction in intelligent robotics systems, particularly applying SLAM, visual servoing, and Transformer methods to scene understanding, action recognition, and task planning.
I am looking forward to working in the fields of wearable robotics, rehabilitation, and therapeutic robots.
Phone
+86 13541154240
Location
Darmstadt, Germany
Let's Connect!
I'm always open to discussing robotics, AI, and potential collaborations. Feel free to reach out!